
2DTE
When Ultrafast Imaging meets Transient Elastography
Hepatoscope 2DTE (two-dimensional transient elastography) is a breakthrough ultrasound technology for liver stiffness measurement (LSM), integrating both transient elastography (Catheline, Wu, and Fink 1999) and ultrafast ultrasound (Tanter and Fink 2014), implemented in an ultraportable format. It is the successful result of years of development and integrates more than ten patents. Powered only through a computer’s USB-C port, Hepatoscope has resolved many technical challenges, including power efficiency, data rate reduction, and portability.

A Brief History of Elastography
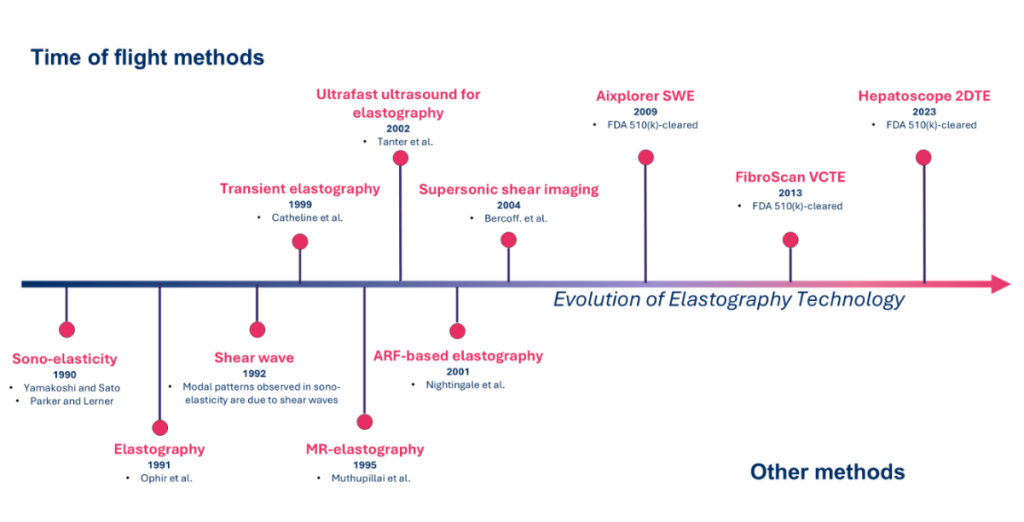
Palpation, i.e. the act of analyzing tissues using the sense of touching, is the ancestor of elastography / elastometry and has been well known since the early times of humanity. Elastography, literally elasticity imaging techniques, gathers non-invasive imaging methods based on the visualization of the mechanical response of a tissue to a vibrational or impulsive force. While the term has been introduced by J. Ophir since 1991 (Ophir et al. 1991), elastography has emerged in the late 80’s with the sono-elasticity technique
(Lerner, Huang, and Parker 1990).
Palpation, i.e. the act of analyzing tissues using the sense of touching, is the ancestor of elastography / elastometry and has been well known since the early times of humanity. Elastography, literally elasticity imaging techniques, gathers non-invasive imaging methods based on the visualization of the mechanical response of a tissue to a vibrational or impulsive force. While the term has been introduced by J. Ophir since 1991 (Ophir et al. 1991), elastography has emerged in the late 80’s with the sono-elasticity technique
(Lerner, Huang, and Parker 1990).

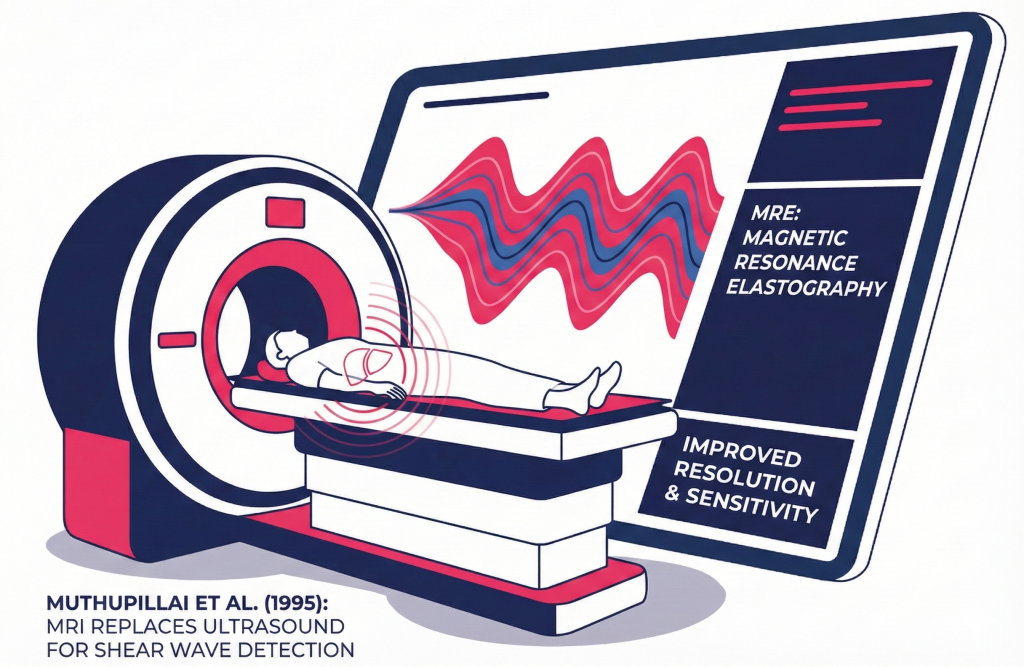
Later in the 90’s, Muthupillai et al. introduced the concept of magnetic resonance-based elastography (MRE) (Muthupillai et al. 1995) in which magnetic resonance imaging (MRI) replaces ultrasound for the detection of modal patterns induced by the shear wave propagation, leading to improved resolution and higher sensitivity.
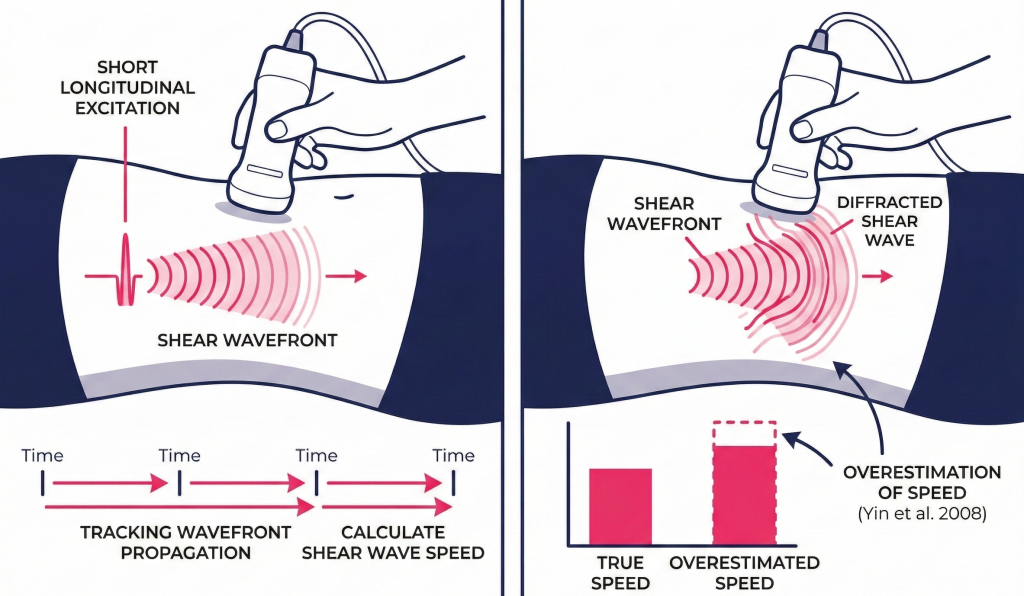
The fundamental concept of transient elastography methods, which emerged in the end of the 90’s, resides in the use of short longitudinal excitations for the shear wave generation. Hence, the shear wave speed is deduced by tracking the propagation of the shear wavefront over time. Although strikingly simple, transient methods suffer from diffraction effects leading to overestimations of the shear wave speed as evidenced in the literature (Yin et al. 2008).
In 2004, the Supersonic shear imaging (SSI) technique was introduced by Bercoff et al. (Bercoff, Tanter, and Fink 2004) based on earlier works on acoustic radiation force-based elastography (Nightingale et al. 2001). In the SSI technique, shear wave propagation is induced by strong ultrasound push beams. It required the development of ultrafast ultrasound imaging to track shear waves in real time, allowing high-resolution elastography imaging, with multiple tissue stiffness levels assessed and displayed simultaneously. While SSI is a powerful and innovative elastography technique, it has some caveats and limitations such as limited penetration, sensitivity to motion and cost as it requires specific extra electronics for push generation.
This is why Hepatoscope 2DTE has been developed. It stands on the shoulders of both
transient elastography for shear wave generation with ultrafast imaging to track shear wave propagation. A shear wave is generated with an external vibrating mass centered at 50Hz, as for other forms of transient elastography (VCTE, ViTE…).
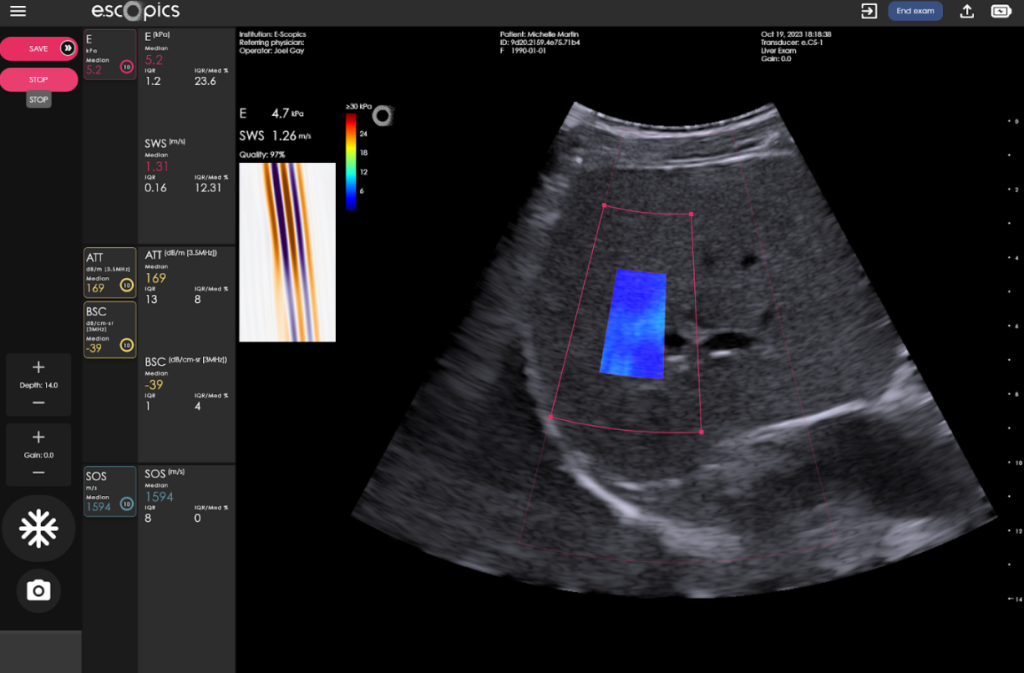
Inspired by the SSI technique, Hepatoscope tracks in two dimensions the tissue displacements induced by shear waves along their propagation direction.
This avoids refraction biases and enables the display of liver stiffness imaging and leads to robust stiffness estimation as a large portion of the liver is sampled.